
Robot de ștanțare cu 4 axe pentru mașina de presă



Introducerea produsului
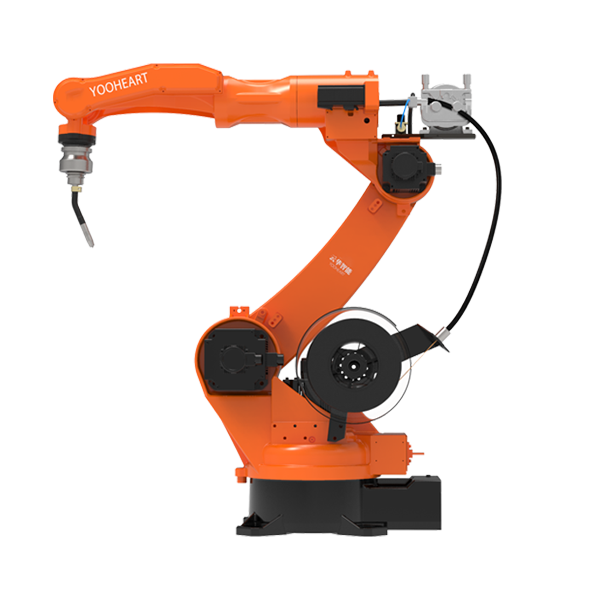
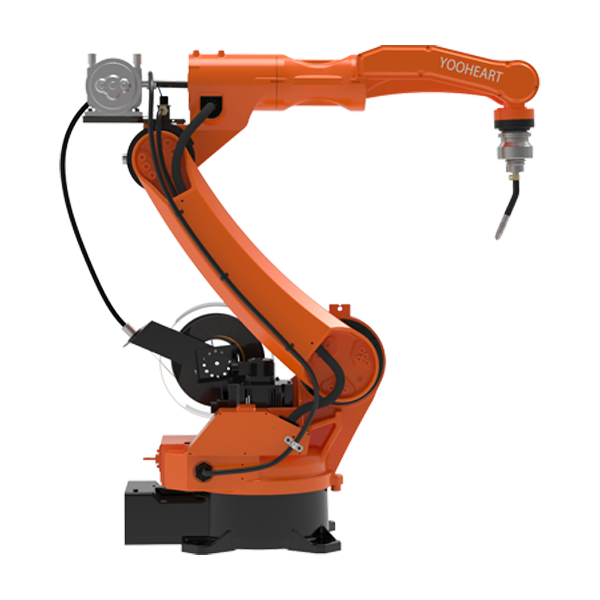
Având în vedere cererea reală de modernizare și transformare a industriei de ștanțare, a fost proiectat și dezvoltat un robot de manipulare a ștanțării pe 4 axe, cu o flexibilitate ridicată și un control simplu.
Robotul de ștanțare cu patru axe adoptă un design cu patru axe, formă compactă, dimensiuni reduse, greutate redusă, utilizat pe scară largă în sudarea cu arc cu argon, paletizare, manipulare, ștanțare și alte domenii, putând realiza o manipulare stabilă și o sudare precisă. Manipulatorul de perforare cu patru axe poate efectua operațiuni de ștanțare flexibil într-un spațiu mic, fiind simplu și convenabil de instalat și depanat.
Piese de bază
Toate piesele de marcă chinezească de înaltă calitate
Servomotor
Marca servomotorului este Ruking, o marcă chinezească cu avantajele reacției rapide, raportului mare cuplu-inerție al cuplului de pornire și așa mai departe. Poate rezista la condiții dure de funcționare care implică accelerații și decelerații frecvente înainte și înapoi și poate suporta supraîncărcări de câteva ori într-un timp scurt.
SISTEM DE CONTROL LNC
Robotul Yooheart adoptă programarea de învățare. Este simplu, convenabil și flexibil în funcționare. Robotul Yooheart acceptă, de asemenea, programarea de la distanță, care poate fi aplicată într-o varietate de programe complexe.
CORPUL ROBOTULUI
Corpul adoptă procesul de turnare sub presiune, utilizând cavitatea matriței pentru a aplica o presiune ridicată asupra formării metalului topit, corpul formând o densitate mare, o rigiditate puternică, iar greutatea proprie este mai mică.
Detalii
Înaltă precizie
Răspuns rapid
Și nivelul este lider
în țară
Simplu ca structură
Ușor de întreținut
Mai rentabil
Viteză mare și stabilitate
Cale precisă
Soluții perfecte de ștanțare
Parametrul robotului
| Proiect | Specificații | Proiect | Specificații | Axă | Gama de mișcare | Viteză maximă | Diametru gol |
| Axă | 4 | Temperatură | 0℃-45℃ | J1 | ±170º | 190º/s | —— |
| Capacitate | 3,7 KVA | Umiditate | 20-80% RH (fără umiditate) | J2 | +10º~+125º | 120º/s | —— |
| Greutate | 170 kg | Vibrații | Sub 4,9 milioane/s² | J3 | +10º~-95º | 120º/s | —— |
| Sarcină utilă maximă | 10 kg | Alţii | Fără gaze și lichide inflamabile și corozive, a se păstra departe de sursele de zgomot electric | J4 | ±360º | 200º/s | —— |
| Interval maxim de lucru | 140 cm | Repetabilitate | ±0,08 mm | Nivel IP | IP65 | Instalare | Sol |
Aplicație robotică
Încărcarea și descărcarea produsului extrudat la cald
Acest proiect este destinat în principal formării ștanțării cuprului. Procesul de perforare cu roșu este un proces de extrudare la cald. În timpul perforarii cu roșu, materialul metalic este încălzit la o anumită temperatură și introdus în matrița preîncălzită. După o mișcare alternativă unică a mașinii-unelte sub presiune, materialul metalic este deformat plastic pentru a obține dimensiunea, forma și proprietățile mecanice bune necesare ale pieselor ștanțate. Clientul adoptă robotul de manipulare pe 4 axe Yooheart pentru a încărca și descărca piesa de prelucrat metalică perforată cu roșu.
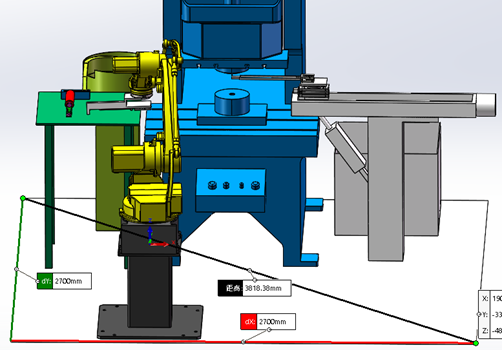
Prezentare generală a soluției de integrare
Proiectul constă dintr-o presă de ștanțat, un robot Yunhua cu 4 axe și o greutate de 10 kg, scule de poziționare secundară, un dispozitiv de ștanțare combinată cu cilindri și așa mai departe. Datele cunoscute, cum ar fi timpul de ștanțare, sarcina nominală și condițiile de lucru, se încadrează toate în intervalul de parametri nominali al HY1010B-140.


Prezentare generală a procesului de producție
Alimentare manuală pentru palan▶ alimentare cu placă vibratoare▶ Poziționarea dispozitivului de alimentare înainte de încălzire▶ încălzirea tubului cu curenți turbionari▶ poziționarea dispozitivului de poziționare secundară▶ prindere robotizată▶ presare cu poanson▶ descărcare dispozitiv de alimentare cu cilindru
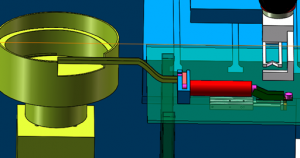
Rezumatul acțiunii dispozitivului de alimentare și poziționare
Alimentați manual placa vibratoare ▶ Placa vibratoare este sursa de material pentru tubul de încălzire cu curenți turbionari ▶ Instrumentul secundar de poziționare este poziționarea clemei robotului
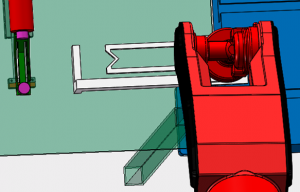
Prezentare generală a acțiunii dispozitivului de prindere
Robotul va fixa materialul de cupru poziționat ▶ pentru formarea prin perforare
Serviciu post-vânzare
Oferim un serviciu post-vânzare perfect pentru a vă ajuta să învățați operarea chiar dacă nu ați folosit niciodată roboți industriali și pentru a rezolva problemele în timpul utilizării.
Mai întâi, vă vom oferi manualele aferente pentru a vă ajuta să înțelegeți câteva informații despre roboți.
În al doilea rând, vom oferi o serie de videoclipuri didactice. Puteți urmări aceste videoclipuri pas cu pas, de la cablare și programare simplă până la finalizarea programelor complexe. Este cea mai eficientă modalitate de a vă ajuta în contextul pandemiei de COVID.
Nu în ultimul rând, vom oferi servicii online cu peste 20 de tehnicieni. Dacă aveți întrebări, ne puteți contacta oricând și vă vom ajuta prompt.


Cerere de ofertă
Î. Este acest lucru sigur pentru lucrători?
A. Sigur, unul dintre avantajele utilizării unui robot pentru preluare și plasare este protejarea lucrătorilor de rănire. Un lucrător poate manipula 5~6 unități de mașină CNC.
Î. Ce fel de produs poate folosi un robot de încărcare și descărcare?
A. Fiecare încărcător robotizat de mașini poate fi echipat cu scule adecvate la capătul brațului, compatibile cu mașina și produsul dumneavoastră. Acestea sunt extrem de precise și au, de asemenea, dexteritatea necesară pentru a manipula piesa cu grijă.
Î. Doar un capăt al uneltelor de braț poate fi folosit pentru încărcarea și descărcarea robotului?
A. Brațul robotic industrial poate modifica programul și clema de prindere, schimbări rapide în depozitarea inteligentă, viteza de depanare, eliminând nevoia de angajați, dar și de timp de instruire, putând fi pus rapid în producție.
Î. Există vreun alt avantaj al robotului de încărcare și descărcare?
A. Îmbunătățirea calității piesei de prelucrat Aspect: linii de producție automatizate cu roboți, de la alimentare, prindere, tăiere în întregime de către roboți, până la reducerea legăturilor intermediare, calitatea piesei este mult îmbunătățită, în special suprafața este mai frumoasă.
Î. Puteți furniza soluții complete pentru încărcarea și descărcarea roboților?
A. sigur, putem face asta împreună cu dealerul nostru.
Categorii de produse
-

YH1006A-175: Robot de sudură cu 6 axe pentru înaltă precizie...
-
Robot de sudură Mig cu 6 axe pentru rafturi de depozitare
-

Stație de lucru robotizată pentru sudură cu arc pe 7 axe
-

Paletizator robotizat cu 6 niveluri de libertate și o sarcină utilă de 165 kg
-
Robot de sudură TIG cu alimentator de sârmă
-

Robot de sudură cu arc pentru piese auto



